CASPER: Cooper Automated Subterranean Probing & Excavating Robot
A Brief Synopsis
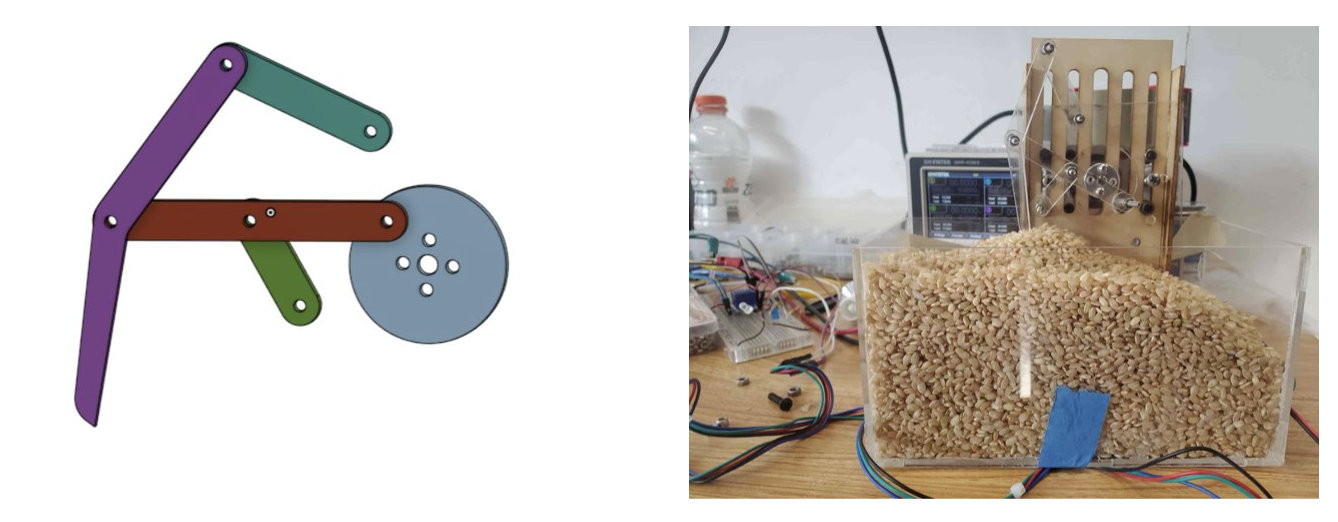
As a final project for ME-494 (Bio - Inspired Robotics), I along with a team of other 2 students designed and fabricated a self-burrowing robot called CASPER - Cooper Automated Subterranian Probing And Excavating Robot. The end goal of the project was to design and test two different leg geometries - Klann (designed and fabricated by myself) and double linkage - by performing kinematic simulations and getting actual data from tracker. While the Klann geometry was derived from the movement of a spider, the double linkage geometry was derived from the motion of a mole crab. Using dry rice as the medium to dig and stepper motor to actuate the robot, the team was able to collect data from both geometries and resulting conclusions were derived. The academic paper on the design and results, along with a working model of the Klann geometry, can be found below.
CASPER’s Klann Geometry In Action!
Click here to see CASPER digging into rice using its klann leg geometry.
Academic Paper Describing CASPER’s Design, Fabrication, and Analysis.
Click here to access the full document.