Applying Reduced-Order Modelling Techniques to a Tuning Fork
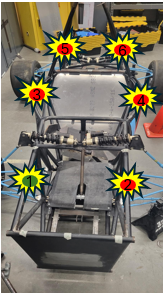
In this project, reduced order modelling is performed to determine best fit state space matrices for a tuning fork. Impulse responses are generated using roving accelerometer on the points marked in…