Using Constrained SINDY and Model Predictive Controller for Trajectory Tracking
Brief Overview
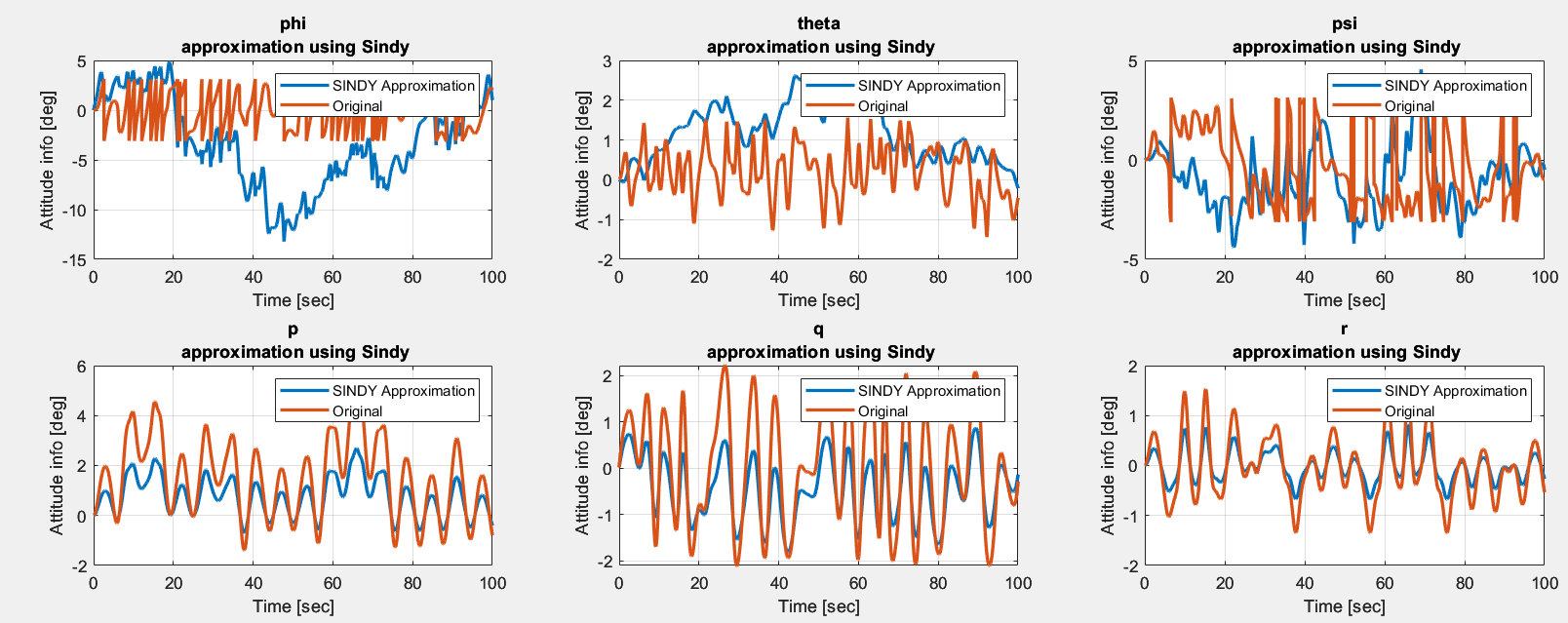
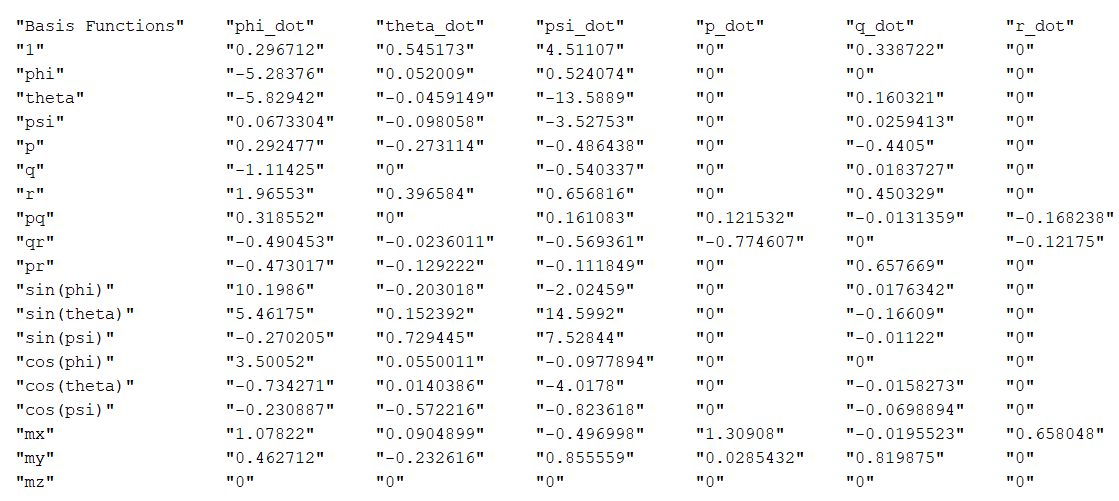
Under this ongoing project, Sparse Identification of Non Linear Dynamics (SINDY) is used to generate simpler model flight dynamics. Test data for the model is generated from the fixed wing aircraft dynamics from the UAV project under “Dynamics and Control”. Series of linear regressions are performed to get the best fitting models. The generated coefficients are shown below.
For the next parts of the project, trajectory generation using cubic spline will be implemented and a MPC will be designed for the trajectory following.