Modelling fish’s oscillatory motion through dynamics of triple pendulum
A Brief Synopsis
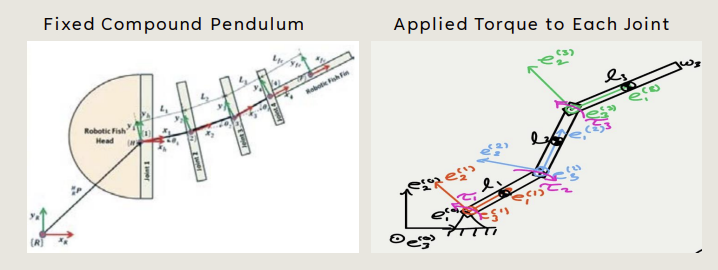
As an end of the semester project for ME-424 Advanced Dynamics, I modelled a fish’s oscillatory motion through the dynamics of a triple pendulum coupled with springs and dampers. By using the method of virtual work and projections, I computed the rotation matrices for each of the 3 pivots, angular velocities, and corresponding Jacobians. This was followed by setting up the mass matrix, frame rotation matrix, and external forces/torques matrix. After deriving the entire dynamics, different test cases are executed to ensure the validity of the model and the spring/damping constants are tuned to achieve a system which resonates with fish’s oscillatory motion.
Oscillatory Motion In Action
Overview on Dynamics and Results
The derivation of the dynamics using virtual work, unit tests and results can be found here
Link To Github
To access the corresponding repository, click here