JARVIS - Four Wheeled SumoBot
A Brief Synopsis
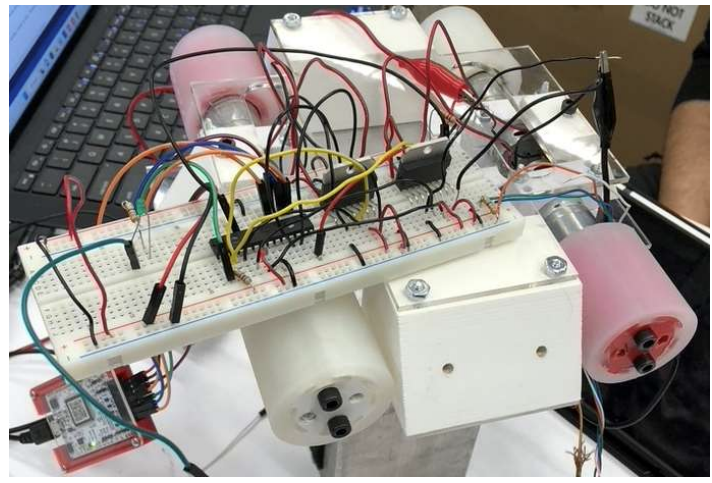
Sumo-bots are high power and wheeled robots designed for competing in the robot-sumo contest at the Cooper Union’s end of the year show. The goal of the competition is to push the opponent’s robot outside a 3ftby-3ft ring made of neoprene rubber. Comprising of 3 mechanical engineering students, our team was tasked with designing and fabricating a 10 inch by 10 inch by 6-inch robot with a weight limit of no more than 5 lbs. To plan the design process, the team broke down the timeline into sub parts – brainstorming, preliminary sketches, final designs, finding mechanical parts, making computer-aided designs, fabricating, finding electrical components, and finalizing the assembly. The team named the robot JASPER which was successful in detecting the edges of the mat and re-directing its trajectory.
JARVIS In Action
Click here to see JARVIS in action.
Academic Paper Detailing JARVIS’ Mechanical And Electrical Design
Click here to access the document.